src.timed_net package¶
Summary¶
This simulations implements a temporal-aware PT net by attaching time information to the PT net tokens. It simulates a supply chain depending on two component producers and an assembler.
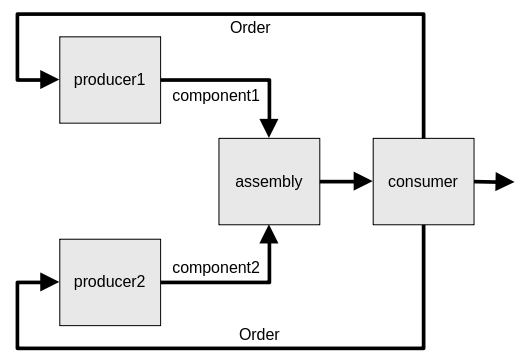
In the diagram,
producer1buildscomponent1in a time interval approximated by a normal distribution \(\mathcal{N}(\mu_1, \sigma_1)\) with the mean \(\mu_1\) and standard deviation \(\sigma_1\) seconds.Similarly
producerbuildscomponent2in a time interval of \(\mathcal{N}(\mu_2, \sigma_2)\)The components are assembled and served to the consumer.
Lastly, the consumer places a new order to the producers.
The picture below is the auto-generated PT net diagram by SoyutNet.
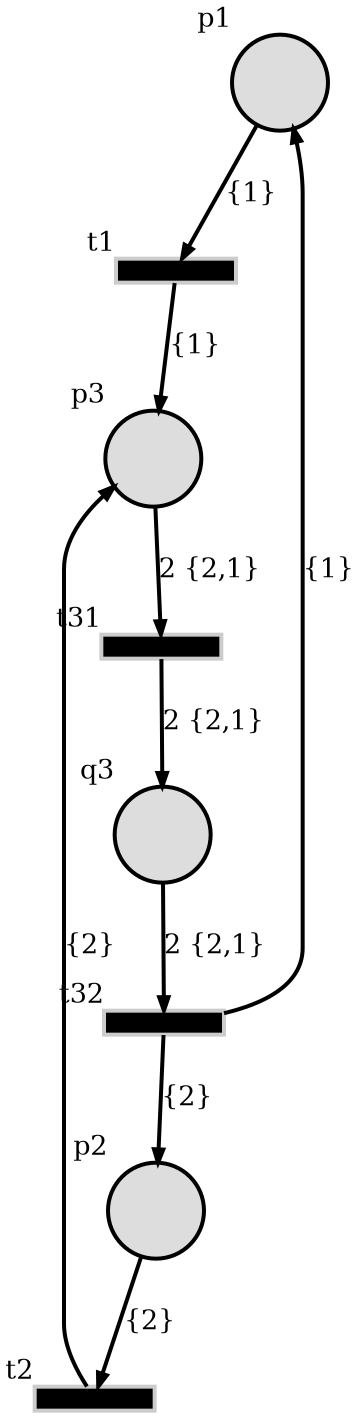
p1andt1define the producer1.p2andt2define the producer2.t31is the assembler.p3is the consumer.The component1 and 2 are labeled by
{1}and{2}.
System description¶
SoyutNet tokens are represented by a tuple of integers.
token: tuple[int, int] = (label, id)
Time information is embedded into the second item (id) of token.
Simulation starts with an initial token at the producers
produer1has(PRODUCER1_LABEL, T0)produer2has(PRODUCER2_LABEL, T0)
where T0 = 0 (secs) initially. Each producer adds a random integer distributed by
\(\mathcal{N}(\mu_i, \sigma_i)\), \(i \in {1,2}\) at a
(TimedTransition) instance then sends to their output arcs.
121
122 class TimedTransition(soyutnet.Transition):
123 def __init__(self, name, rng_params, *args, **kwargs):
124 super().__init__(name=name, net=net, *args, **kwargs)
125 self._rng_params = rng_params
126
127 def _delay(self):
128 return round(random.gauss(*self._rng_params))
129
130 async def _process_tokens(self):
131 for label in self._tokens:
132 ids = self._tokens[label]
133 self._tokens[label] = list(map(lambda x: x + self._delay(), ids))
134 """Add producer delay"""
135
136 return await super()._process_tokens()
137
The assembler receives tokens, redirects to the consumer. The total duration of this process is the maximum of the delay introduced by producers.
141
142 class CombinerTransition(soyutnet.Transition):
143 def __init__(self, *args, **kwargs):
144 super().__init__(net=net, *args, **kwargs)
145 self.arrival_time = []
146
147 async def _process_tokens(self):
148 max_id = 0
149 arrivals = [0, 0]
150 for label in self._tokens:
151 ids = self._tokens[label]
152 arrivals[label - 1] = max(ids)
153 if ids:
154 max_id = max(max_id, arrivals[label - 1])
155 for label in self._tokens:
156 self._tokens[label] = [max_id] * len(self._tokens[label])
157 """Total delay is the max of two branches"""
158
159 self.arrival_time.append(arrivals)
160
161 return await super()._process_tokens()
162
The consumer places an other order to the producers after receiving the token. At each cycle, the token IDs are incremented.
The tokens are counted by the consumer and the timings are saved.
533
534 production_time = TimeInstants()
535 Ti = lambda k: production_time[k - 1]
536 controller = Controller(production_time=production_time)
537 converged = asyncio.Condition()
538
539 async def stock_counter(tr):
540 nonlocal production_time, converged
541 t = None
542 for label in tr._tokens:
543 ids = tr._tokens[label]
544 if not ids:
545 continue
546 for id in ids:
547 if t is None:
548 t = id
549 production_time.append(t)
550 else:
551 assert t == id
552
553 dT = Ti(0) - Ti(-1)
554 controller.measure(dT)
555 u = controller.advance()
556 """
557 Measured production time and generated the amount of new order delays ``u``.
558 u = (dt1, dt2) means that new order to producer1 and 2 will be placed after
559 dt1 and dt2 seconds.
560 """
561 if controller.is_done():
562 """If simulation is done inform the canceller."""
563 async with converged:
564 converged.notify_all()
565
566 for i in range(2):
567 """Postpone orders."""
568 label = i + 1
569 assert len(tr._tokens[label]) == 1
570 tr._tokens[label][0] += u[i]
571
572 return True
573
The whole implementation can be found at https://github.com/dmrokan/soyutnet-simulations/blob/main/src/timed_net/main.py
Joint probability distribution¶
The total duration of the described process is distributed according to
The mean and variance of \(X\) is given as
where \(\Phi\) and \(\phi\) are the CDF and PDF of normal random distribution [nadarajah2008].
20
21
22def pdf(x, mean=0, std=1):
23 """phi"""
24 var = std**2
25 a = 2 * math.pi * var
26 a = 1 / (a**0.5)
27 return a * math.exp(-((x - mean) ** 2) / (2 * var))
28
29
30def cdf(x, mean=0, std=1):
31 """Phi"""
32 a = 2**0.5
33 return 0.5 * (1 + math.erf((x - mean) / (std * a)))
34
35
Real-time moment estimation¶
The moments \(E[X], E[X^2]\) and variance \(Var[X]\) can be estimated by dynamic averaging of observed random variable \(x_n\).
For this purpose, a special list class NormalSamples is implemented.
244
245 relative_error = lambda a, b, c=1 / (2**BIT_WIDTH - 1): abs((a - b) / (b + c))
246
247 class NormalSamples(UserList):
248 def __init__(
249 self,
250 *args,
251 eps=1e-2,
252 convergence_condition=10,
253 rng_params=None,
254 validate_conv=False,
255 ):
256 super().__init__(*args)
257 self._eps = eps
258 self._moments = None
259 self._variance = Qp.tuple((0, eps, 0.0))
260 self._cc = convergence_condition
261 self._rng_params = None
262 if rng_params is not None:
263 self.set_rng_params(rng_params)
264 self._max_size = 600 * 1024 * 1024
265 self._initialize_moments()
266 self._iter = 0
267 self._validate_conv = validate_conv
268 if validate_conv:
269 self._last_n_dmu = Qp.list([0] * self._cc)
270 self._last_n_dvar = Qp.list([0] * self._cc)
271
As products arrive, the difference between the ordering time and arrival time is
calculated. When this delta time is appended to the NormalSamples, it automatically
updates moments and variance.
287
288 def _update_moment(self, moment, val):
289 moment = Qp.tuple(moment)
290 if abs(val) < 1e-2 * self._eps:
291 """Ignore very small numbers in statistics"""
292 return moment
293 l = len(self)
294 mu, eps, eps0 = moment
295 if l % self._cc == 0:
296 eps0 = 0.0
297 mu_prev = mu
298 mu = (mu * l + val) / (l + 1)
299 dmu = relative_error(mu_prev, mu)
300 eps = (eps * l + dmu) / (l + 1)
301 eps0 = max(eps0, eps)
302 assert isinstance(mu, Qp)
303 assert isinstance(eps, Qp)
304 assert isinstance(eps0, Qp)
305 """
306 Save the max of last self._cc samples which
307 will be used for deciding convergence later.
308 """
309
310 return (mu, eps, eps0)
311
If last N samples are very close to each other distrbution,
the NormalSamples instance informs about convergence.
muis the estimate of moment calculated by dynamic averaging.epsthe average change in current and previousmu.eps0is the max of lastself._ccnumber ofepsvalues which is used to determine convergence.
Estimate producer delays¶
The problem is developing an algorithm to estimate the producer delays separately by using the difference between the time a new order is placed and the time when the product is received.
System model¶
A simple model of the producer/consumer flow can be
\(n\) is the product counter starting from zero.
\(x_i\) is the production time of component_i.
\(w_i\) is a Gaussian random variable, \(E[w_i] = \mu_i, Var[w_i] = \sigma_i^2\).
\(y = x\) is the total production observed by the consumer, \(E[y] = \mu, Var[y] = \sigma^2\).
\(u_i (sec)\) denotes postponing the orders by the consumer. It is assumed that the consumer can schedule orders for later instead of placing them immediately.
The units are seconds.
State machine observer/controller scheme¶
The observer/controller scheme runs a few tests on the producer/consumer flow. The order of tests are implemented as a state machine with the states below
409
410 class State(Enum):
411 OBSERVE_JOINT_DIST = auto()
412 TEST_PRODUCER1 = auto()
413 TEST_PRODUCER2 = auto()
414 ESTIMATE_DELAYS = auto()
415 DONE = auto()
416
OBSERVE_JOINT_DIST: Estimate joint mean (\(\mu\)) and variance (\(\sigma\)).TEST_PRODUCER1: Find out producer1’s response by postponing orders.TEST_PRODUCER2: Find out producer2’s response by postponing orders.ESTIMATE_DELAYS: Calculate the difference between \(\mu_1\) and \(\mu_2\) approximately.DONE: Exit simulation.
The state machine is implemented as below.
486
487 def advance(self):
488 """Iterate the controller"""
489 match self._state[0]: # Check current state
490 case State.OBSERVE_JOINT_DIST: # Initial state
491 """1. Validate that total production time is as expected."""
492 mu, std, conv = self.found()
493 assert isinstance(mu, int)
494 assert isinstance(std, int)
495 if conv: # Check convergence
496 self._observed.append(self._u + (mu, std))
497 match self._state[-1]: # Check previous state
498 case State.OBSERVE_JOINT_DIST:
499 self._change_state(State.TEST_PRODUCER1)
500 case State.TEST_PRODUCER1:
501 self._change_state(State.TEST_PRODUCER2)
502 case State.TEST_PRODUCER2:
503 self._change_state(State.ESTIMATE_DELAYS)
504 case State.ESTIMATE_DELAYS:
505 self._change_state(State.DONE)
506 case State.TEST_PRODUCER1:
507 """2. Postpone ordering from producer1"""
508 self._u = (self._mu0, 0)
509 self._update_rng_params(tuple(self._u))
510 self._change_state(State.OBSERVE_JOINT_DIST)
511 case State.TEST_PRODUCER2:
512 """3. Postpone ordering from producer2"""
513 self._u = (0, self._mu0)
514 self._update_rng_params(tuple(self._u))
515 self._change_state(State.OBSERVE_JOINT_DIST)
516 case State.ESTIMATE_DELAYS:
517 """4. Estimate the slow producer"""
518 test1 = self._observed[1]
519 test2 = self._observed[2]
520 dt = test1[2] - test2[2]
521 index = int(dt > 0)
522 dt = abs(dt)
523 self._slow_producer = (index + 1, dt)
524 self._u = (0, 0)
525 self._update_rng_params(tuple(self._u))
526 self._change_state(State.OBSERVE_JOINT_DIST)
527
528 return tuple(map(int, self._u))
529
Set \(u_1[n] = u_2[n] = 0\) for all n,
OBSERVE_JOINT_DIST: Estimate the reference \((\mu_0, \sigma_0)\) and record.TEST_PRODUCER1: Set \(u_1[n] = \mu_0, u_2[n] = 0\) for all n.OBSERVE_JOINT_DIST: Estimate \((\mu_1, \sigma_1)\) and record.TEST_PRODUCER2: Set \(u_1[n] = 0, u_2[n] = \mu_0\) for all n.OBSERVE_JOINT_DIST: Estimate \((\mu_2, \sigma_2)\) and record.ESTIMATE_DELAYS: The difference between the production time of producers is \(dt = |\mu_1 - \mu_2|\) and the index of slow producer isint(dt > 0) + 1.DONE: Exit.
Integer arithmetic implementation¶
In this simulation, all calculations are done on Python’s
Fraction instances instead
of float s. This simulation implements a new class called Qp to ensure
all basic math operations returns a Fraction.
A Fraction can be instantiated by an int, float, str and it converts
the input to a tuple of (numerator, denominator) of type tuple[int, uint].
Also, a limit to the denominator can be set. For example:
>>> Fraction(-0.3).limit_denominator(10)
Fraction(-3, 10)
>>> Fraction(0.3).limit_denominator(2)
Fraction(1, 2)
>>> Fraction(0.3).limit_denominator(1)
Fraction(0, 1)
In the example, Fraction(0, 1) and Fraction(-3, 10) are equivalent to \(0/1\) and
\(-3/10\). As the denominator limit increases, the precision of calculations increases.
Because, the numbers less than one can still be represented in the calculations.
166
167 class Qp:
168 def __init__(self, num=0, max_den=(2**BIT_WIDTH - 1)):
169 self._max_den = max_den
170 if isinstance(num, Qp):
171 num = num.num
172 self.num = self._new_num(num)
173
174 def _new_num(self, num):
175 return Fraction(num).limit_denominator(self._max_den)
176
177 @staticmethod
178 def tuple(iterable):
179 return tuple(map(Qp, iterable))
180
181 @staticmethod
182 def list(iterable):
183 return list(map(Qp, iterable))
184
185 def int_op(op, swap=False):
186 def inner(func):
187 def wrapped(self, *args):
188 a, b = self, Qp(args[0])
189 if swap:
190 a, b = b, a
191 return Qp(op(a.num, b.num))
192
193 return wrapped
194
195 return inner
196
197 # fmt: off
198 @int_op(operator.mul)
199 def __mul__(self, other): ...
200 @int_op(operator.truediv)
201 def __truediv__(self, other): ...
202 @int_op(operator.add)
203 def __add__(self, other): ...
204 @int_op(operator.sub)
205 def __sub__(self, other): ...
206 @int_op(operator.pow)
207 def __pow__(self, other): ...
208 @int_op(operator.gt)
209 def __gt__(self, other): ...
210 @int_op(operator.lt)
211 def __lt__(self, other): ...
212
213 @int_op(operator.mul, True)
214 def __rmul__(self, other): ...
215 @int_op(operator.truediv, True)
216 def __rtruediv__(self, other): ...
217 @int_op(operator.add, True)
218 def __radd__(self, other): ...
219 @int_op(operator.sub, True)
220 def __rsub__(self, other): ...
221 @int_op(operator.pow, True)
222 def __rpow__(self, other): ...
223 # fmt: on
224
225 def __str__(self):
226 return str(self.num)
227
228 def __float__(self):
229 return float(self.num)
230
231 def __int__(self):
232 return int(self.num)
233
234 def __abs__(self):
235 return Qp(abs(self.num))
236
237 def is_zero(self, eps=1e-2):
238 eps = max(eps, 1 / self._max_den)
239 return abs(self) < Qp(eps)
240
By using this reference implementation, it can be translated to work on an MCU platform. However, it will require limiting the magnitude of numerator together with the denominator. Because, the integer size is unlimited in Python.
Results¶
The simulation is run for several different \(\mu_i\) and \(\sigma_i\) as defined below in __main__.py
28
29RNG_PARAMS = [
30 #mu_1, sigma_1, mu_2, sigma_2 (minutes)
31 (100, 5, 100, 5),
32 (100, 25, 100, 25),
33 (100, 5, 50, 5),
34 (50, 5, 100, 25),
35 (100, 5, 20, 5),
36 (20, 5, 100, 25),
37]
38
The table below shows the joint probability distribution characteristics.
mu0is \(E[X]\) in the equation above.std0is \(\sqrt{Var[X]}\) in the equation above.muis obtained by calculating the mean of the difference of saved timings.stdis obtained by calculating the standard deviation of the difference of saved timings.The values are in seconds.
mu |
mu0 |
std |
std0 |
|---|---|---|---|
6232 |
6169 |
181 |
247 |
6942 |
6846 |
1241 |
1238 |
5943 |
6000 |
229 |
299 |
5806 |
6014 |
1269 |
1467 |
5817 |
6000 |
248 |
300 |
5977 |
6000 |
1582 |
1498 |
5987 |
6169 |
199 |
247 |
6504 |
6846 |
950 |
1238 |
5933 |
6000 |
309 |
299 |
6199 |
6014 |
1651 |
1467 |
6045 |
6000 |
378 |
300 |
6093 |
6000 |
1355 |
1498 |
The next table shows estimation results.
weak = 1means that only mean values are used to determine convergence.epsis the relative error tolerance to determine convergence.iteris the final value of the product counter.mu,mu0andDmuare estimated, actual mean value and the relative error.std,std0andDstdare estimated, actual standard deviation and the relative error.slowis the estimated slow producer indices (‘*’ indicates wrong estimation).Dt,Dt0anderrare estimated, actual production delay differences and their relative error.e.g.
slow = 1andDt = 1000mean the producer1 is 1000 seconds slower than the producer2.
The values are in seconds except
weak,iterandslow, former are unitless.
weak |
eps |
iter |
mu |
mu0 |
Dmu |
std |
std0 |
Dstd |
slow |
Dt |
Dt0 |
err |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
0 |
0.01 |
47 |
6231 |
6169 |
0.01 |
1 |
247 |
0.992 |
2* |
1 |
0 |
0.99 |
0 |
0.01 |
47 |
6942 |
6846 |
0.014 |
1 |
1238 |
0.998 |
2* |
293 |
0 |
1.0 |
0 |
0.01 |
47 |
5943 |
6000 |
0.009 |
1 |
299 |
0.993 |
2 |
3014 |
3000 |
0.0 |
0 |
0.01 |
47 |
5806 |
6014 |
0.035 |
1 |
1467 |
0.999 |
1 |
2910 |
3000 |
0.03 |
0 |
0.01 |
47 |
5819 |
6000 |
0.03 |
1 |
300 |
0.993 |
2 |
4744 |
4800 |
0.01 |
0 |
0.01 |
47 |
5978 |
6000 |
0.004 |
1 |
1498 |
0.999 |
1 |
4097 |
4800 |
0.17 |
1 |
0.01 |
47 |
6141 |
6169 |
0.005 |
1 |
247 |
0.992 |
2* |
107 |
0 |
1.0 |
1 |
0.01 |
47 |
6182 |
6846 |
0.097 |
1 |
1238 |
0.998 |
2* |
758 |
0 |
1.0 |
1 |
0.01 |
47 |
5895 |
6000 |
0.017 |
1 |
299 |
0.993 |
2 |
3122 |
3000 |
0.04 |
1 |
0.01 |
47 |
5440 |
6014 |
0.095 |
1 |
1467 |
0.999 |
1 |
3325 |
3000 |
0.1 |
1 |
0.01 |
47 |
5947 |
6000 |
0.009 |
1 |
300 |
0.993 |
2 |
4936 |
4800 |
0.03 |
1 |
0.01 |
47 |
6357 |
6000 |
0.059 |
1 |
1498 |
0.999 |
1 |
5175 |
4800 |
0.07 |
0 |
0.1 |
47 |
6151 |
6169 |
0.0 |
1 |
247 |
0.99 |
2* |
126 |
0 |
1.0 |
0 |
0.1 |
47 |
7193 |
6846 |
0.05 |
1 |
1238 |
1.0 |
1 |
705 |
0 |
1.0 |
0 |
0.1 |
47 |
5902 |
6000 |
0.02 |
1 |
299 |
0.99 |
2 |
2968 |
3000 |
0.01 |
0 |
0.1 |
47 |
6136 |
6014 |
0.02 |
1 |
1467 |
1.0 |
1 |
2621 |
3000 |
0.14 |
0 |
0.1 |
47 |
5859 |
6000 |
0.02 |
1 |
300 |
0.99 |
2 |
4975 |
4800 |
0.04 |
0 |
0.1 |
47 |
5899 |
6000 |
0.02 |
1 |
1498 |
1.0 |
1 |
4414 |
4800 |
0.09 |
1 |
0.1 |
47 |
6179 |
6169 |
0.0 |
1 |
247 |
0.99 |
1 |
70 |
0 |
1.0 |
1 |
0.1 |
47 |
6982 |
6846 |
0.02 |
1 |
1238 |
1.0 |
2* |
807 |
0 |
1.0 |
1 |
0.1 |
47 |
5871 |
6000 |
0.02 |
1 |
299 |
0.99 |
2 |
3115 |
3000 |
0.04 |
1 |
0.1 |
47 |
6381 |
6014 |
0.06 |
1 |
1467 |
1.0 |
1 |
3467 |
3000 |
0.13 |
1 |
0.1 |
47 |
5972 |
6000 |
0.0 |
1 |
300 |
0.99 |
2 |
4910 |
4800 |
0.02 |
1 |
0.1 |
47 |
6155 |
6000 |
0.03 |
1 |
1498 |
1.0 |
1 |
4761 |
4800 |
0.01 |
weak |
eps |
iter |
mu |
mu0 |
Dmu |
std |
std0 |
Dstd |
slow |
Dt |
Dt0 |
err |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
0 |
0.01 |
47 |
5987 |
6169 |
0.03 |
205 |
247 |
0.17 |
1 |
28 |
0 |
1.0 |
0 |
0.01 |
47 |
6504 |
6846 |
0.05 |
855 |
1238 |
0.309 |
2* |
853 |
0 |
1.0 |
0 |
0.01 |
47 |
5933 |
6000 |
0.011 |
286 |
299 |
0.043 |
2 |
2838 |
3000 |
0.06 |
0 |
0.01 |
47 |
6199 |
6014 |
0.031 |
1506 |
1467 |
0.027 |
1 |
2963 |
3000 |
0.01 |
0 |
0.01 |
47 |
6045 |
6000 |
0.007 |
339 |
300 |
0.13 |
2 |
4722 |
4800 |
0.02 |
0 |
0.01 |
47 |
6093 |
6000 |
0.015 |
1227 |
1498 |
0.181 |
1 |
4565 |
4800 |
0.05 |
1 |
0.01 |
47 |
6271 |
6169 |
0.017 |
249 |
247 |
0.008 |
2* |
89 |
0 |
1.0 |
1 |
0.01 |
47 |
7733 |
6846 |
0.13 |
1020 |
1238 |
0.176 |
1 |
319 |
0 |
1.0 |
1 |
0.01 |
47 |
5864 |
6000 |
0.023 |
359 |
299 |
0.201 |
2 |
3238 |
3000 |
0.07 |
1 |
0.01 |
47 |
6277 |
6014 |
0.044 |
1958 |
1467 |
0.335 |
1 |
3258 |
3000 |
0.08 |
1 |
0.01 |
47 |
5812 |
6000 |
0.031 |
315 |
300 |
0.05 |
2 |
4829 |
4800 |
0.01 |
1 |
0.01 |
47 |
5241 |
6000 |
0.126 |
1214 |
1498 |
0.19 |
1 |
4532 |
4800 |
0.06 |
0 |
0.1 |
47 |
6150 |
6169 |
0.0 |
171 |
247 |
0.31 |
1 |
114 |
0 |
1.0 |
0 |
0.1 |
47 |
6355 |
6846 |
0.07 |
1022 |
1238 |
0.17 |
1 |
730 |
0 |
1.0 |
0 |
0.1 |
47 |
5926 |
6000 |
0.01 |
147 |
299 |
0.51 |
2 |
2957 |
3000 |
0.01 |
0 |
0.1 |
47 |
5909 |
6014 |
0.02 |
1417 |
1467 |
0.03 |
1 |
3326 |
3000 |
0.1 |
0 |
0.1 |
47 |
5925 |
6000 |
0.01 |
277 |
300 |
0.08 |
2 |
4764 |
4800 |
0.01 |
0 |
0.1 |
47 |
6497 |
6000 |
0.08 |
1324 |
1498 |
0.12 |
1 |
5304 |
4800 |
0.1 |
1 |
0.1 |
47 |
6143 |
6169 |
0.0 |
202 |
247 |
0.18 |
2* |
60 |
0 |
1.0 |
1 |
0.1 |
47 |
6682 |
6846 |
0.02 |
1019 |
1238 |
0.18 |
2* |
1127 |
0 |
1.0 |
1 |
0.1 |
47 |
6146 |
6000 |
0.02 |
256 |
299 |
0.14 |
2 |
3006 |
3000 |
0.0 |
1 |
0.1 |
47 |
6199 |
6014 |
0.03 |
890 |
1467 |
0.39 |
1 |
2470 |
3000 |
0.21 |
1 |
0.1 |
47 |
5967 |
6000 |
0.01 |
276 |
300 |
0.08 |
2 |
4773 |
4800 |
0.01 |
1 |
0.1 |
47 |
5496 |
6000 |
0.08 |
1454 |
1498 |
0.03 |
1 |
4791 |
4800 |
0.0 |
References¶
S. Nadarajah and S. Kotz, “Exact Distribution of the Max/Min of Two Gaussian Random Variables,” 2008
Reproduce¶
sudo apt install python3-venv graphviz
python3 -m venv venv
source venv/bin/activate
make build
make build=timed_net
make clean=timed_net
make run=timed_net
make results=timed_net
make graph=timed_net
make docs
Usage¶
Submodules¶
src.timed_net.main module¶
- src.timed_net.main.USAGE()¶
- Arguments:
- -r <rng params>
mu1,std1,mu2,std2 (units are seconds)
Default: 300,60,600,180
- -T <time (sec)>
total simulation time in seconds
Default: 2
- -o <filename>
output file name to write results. If empty, prints to stdout.
- -G
if provided, the script generates PT net graph and exits
- -W
if provided, uses a weak comparion metric for convergence which highly increase simulation speed with the cost of degraded accuracy.
- -C <strict|weak>
Controller type. ‘weak’ is equivalent to setting -W argument.
Default: strict
- -e eps
Relative tolerance to determine convergence.
Default: 1e-2
- -b denominator bit width (bw)
The denominator of Fraction used in calculations are limited to 2^(bw)-1
- Example
python src/timed_net/main.py -r 100,10,200,25 -T 2
src.timed_net.results module¶
- src.timed_net.results.cdf(x, mean=0, std=1)¶
Phi
- src.timed_net.results.joint_mean(dist1, dist2)¶
- src.timed_net.results.joint_variance(dist1, dist2)¶
- src.timed_net.results.load_results()¶
- src.timed_net.results.main(argv)¶
- src.timed_net.results.pdf(x, mean=0, std=1)¶
phi
Comments¶
Table 1 shows that mean and variance is very close to the values obtained from the results of equations.
Table 2 shows that estimator works correctly even if it operates on integers. But, it can not estimate the variance by using integer precision.
Table 3 shows that estimator works correctly when fractional numbers are used. And, it can more or less estimate the variance.
It is hard to estimate small differences between \(\mu_1\) and \(\mu_2\).